在将一个 Unity 2022.3 数字孪生项目(利用Unity3D_Robotics_ABB)从原 Win 平台迁移到 WebGL 平台的过程中,遇到了 RuntimeError: null function or function signature mismatch、 The script 'xxxxx' could not be instantiated!、digest auth failed 等等报错和故障。在对网上的解决方案探索和尝试的过程中,有小结如下
System.Threading 相关命名空间(C# 原生线程)不支持
这是着手切换WebGL平台之前就知道不行的一点,不过使用 UniTask 可以替换。
原 Unity3D_Robotics_ABB 作者在其实现中主要使用了原生的 Thread 来处理异步的逻辑,在 Unity 打 WebGL 包时并没有报错且能成功出包,然而,在运行 WebGL 的程序时(尤其做某些会拉起线程的操作时),会出现卡死、弹窗报错RuntimeError: null function or function signature mismatch 的问题。
若出现上述问题,应该考虑利用 Unity 托管的异步实现(UniTask、协程等),或 async/await 关键词处理对应需求。
System.Net 相关命名空间不支持(需要利用Unity提供的 UnityWebRequest(UWR) 来进行 HTTP 请求)
这是解决问题花费时间比较长的一点。
在解决完线程的问题后,运行 WebGL 程序,发现会出现 The script 'xxxxx' could not be instantiated! 等控制台警告,且此脚本功能失效。经过测试后,发现脚本中若引用了 System.Net 等 .NET networking classes,则此脚本不能被正确加载,见 WebGL Networking ,此时需要使用 UnityWebRequest 类进行 http 请求。
由于 UnityWebRequest 没有对 Authentication 的支持,需要手动处理一些问题:digest auth failed 。例如,Basic 验证方案可以自己加Header 并存入对应值。然而,对于 Digest 验证方案,手动处理比较麻烦。此时考虑调 JavaScript 的加 Digest 验证的方法并发送 HTTP 请求,或者由代理服务器添加 Digest 验证
技术水平有限,最终选择了由代理服务器添加 Digest 验证的方法,下面是对应的 Python 程序:
1 | from flask import Flask, request, Response |
短时间内利用 UWR 对 RWS 发送大量请求
为了追求项目的实时性,短时间内 Unity 利用 UWR 向机械臂(RWS)发送大量请求,前70个请求成功,而后的请求报 “503 Service Unavailable (Too many sessions 70/70)”错,且当双方断开连接时,仍需要一段时间“冷却”,而后才能请求正确收到回复,然后短时间内约70个 UWR 的 http 的请求后,重复上述 503 错误。使用C#提供的 HTTP 相关类时未见此问题。当503报错时,关闭代理服务器,重新插拔网线,都不能立刻释放此70个sessions。
值得注意的是,当 UWR 已经收到503报错时,再继续使用Postman测试相关接口,如(http://192.168.x.x/rw/rapid/tasks/T_ROB1/motion?resource=jointtarget)时,Postman有时可以正常收到数据。复盘此情况,推测是在排障中,由 Postman 已经发送了带 http头”Connection: Keep-Alive”并成功建立了正常的连接,早于 UWR 的请求,换言之,其 70 个session中已经维护了一个与postman的长连接。冷却后,使用 Postman 短时间内大量测试相关接口可以持续获得正常的数据,未见503报错。
冷却后,当使用Edge浏览器短时间内大量访问接口,前70个请求成功,而后的也会503报错,表现与 UWR 一样,且观察浏览器发出的 HTTP 请求,其已携带”Connection: Keep-Alive”,不同的是,浏览器发出的 HTTP 带有很长的“User-Agent”头,这一点没弄明白。
冷却后,当使用 Python 对接口短时间内大量发送简单的http请求(不挟带请求头”Connection: Keep-Alive”)时,前70个请求成功,而后的也会503报错,表现与 UWR 一样。
经检查,(编辑器 2022.3 版本默认的) UWR 发出的 HTTP 请求默认不携带标头 Connection: Keep-Alive,有讨论,见Connection: keep-alive in Unity Web Request?,且当使用 UnityWebRequest.SetRequestHeader 手动设置此标头时,会见警告且官方文档不推荐如此做。
最终,通过 UnityWebRequest.SetRequestHeader 手动设置标头”Connection: Keep-Alive”,解决了上述 503 报错。
几乎同一时刻对 RWS 发送多个请求
在将原线程替换为 UniTask 后,某个方法每帧将同时对 RWS 发送三个不同的 HTTP 请求,导致报 “Connection manager can’t add .. ” 错,改为一帧(约23ms)轮流发一个 HTTP 请求后解决。
HttpClient.PostAsync 与 UnityWebRequest.Post
使用PostAsync时,需要传入一个string和一个httpcontent,在使用 .Post 时,可以是两个string,也可以是一个string和一个 WWWForm,推荐使用后者,可以规避一些可能的编码问题。
反序列化时 dynamic 关键字引起的崩溃
项目中使用从 Unity Package Manager 中添加的 Newtonsoft.Json 来处理请求,原本从字符串中反序列化对象代码如下:
1 | dynamic obj = JsonConvert.DeserializeObject(jsonStr); |
初次尝试打WebGL包时会报缺少某命名空间错,而后在项目设置中将 API 兼容性 级别改为 .Net Framewrok 后不再报错。
上述代码会导致WebGL运行时弹窗报错奔溃,推荐参考 json 的内容定义类型而后获取对应字段的值(JSON2CSharp)。
1 | [] |
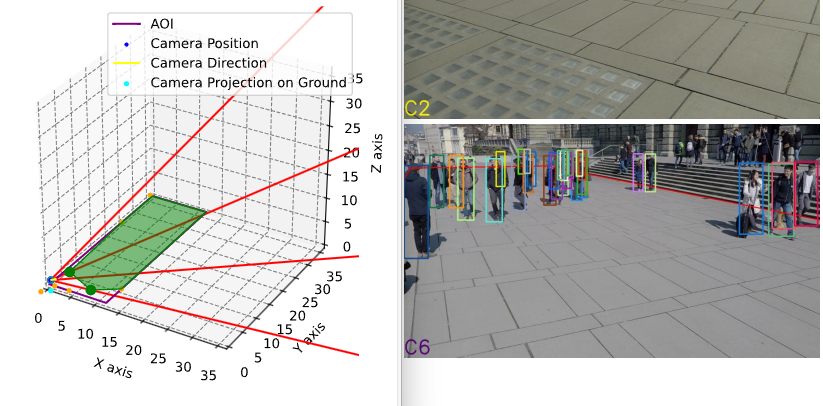
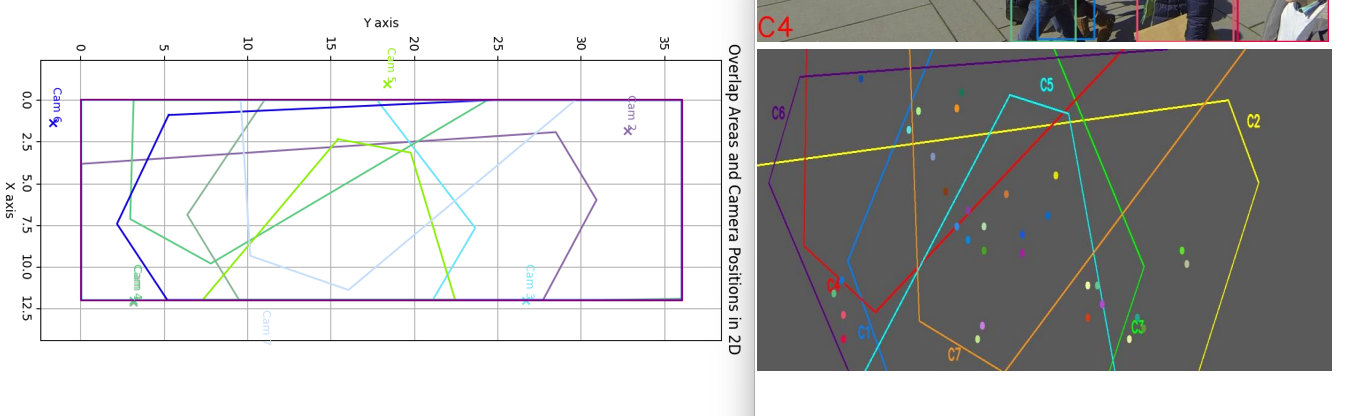

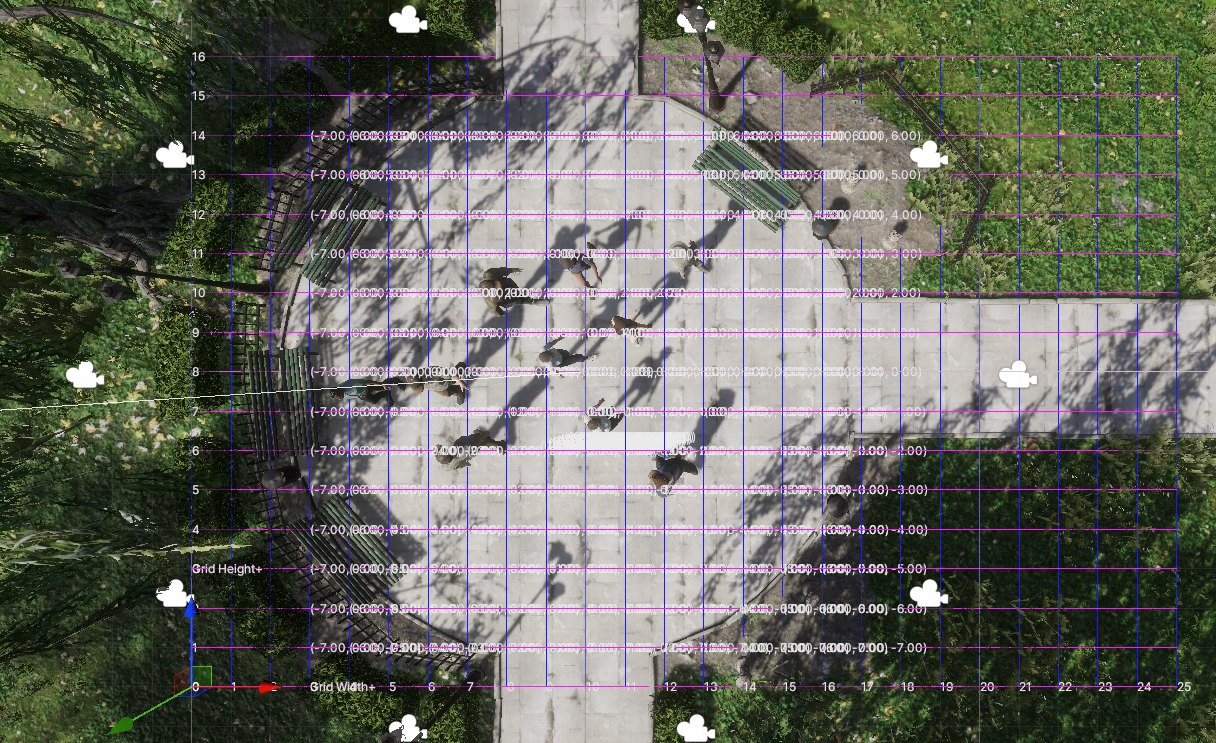


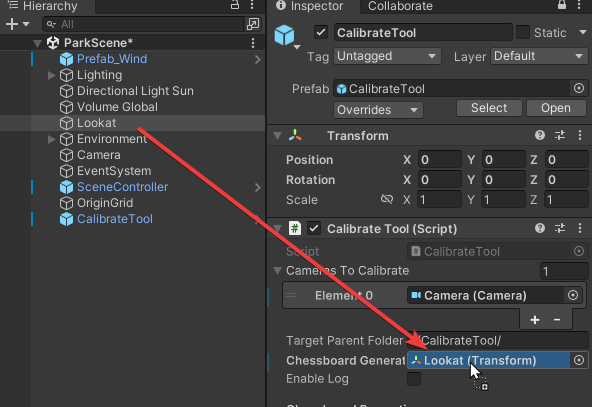
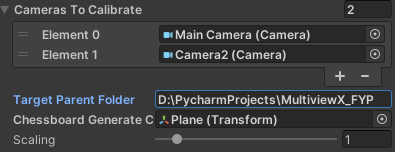

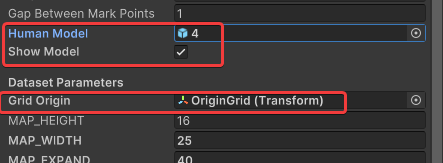
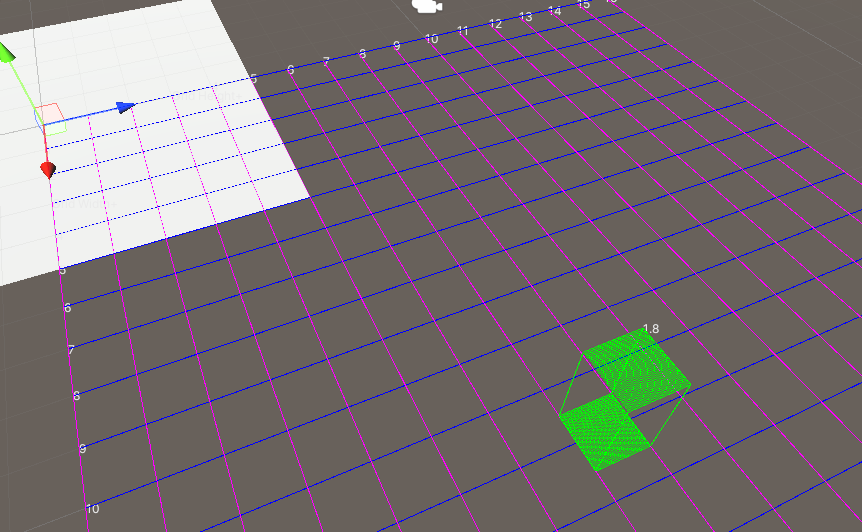
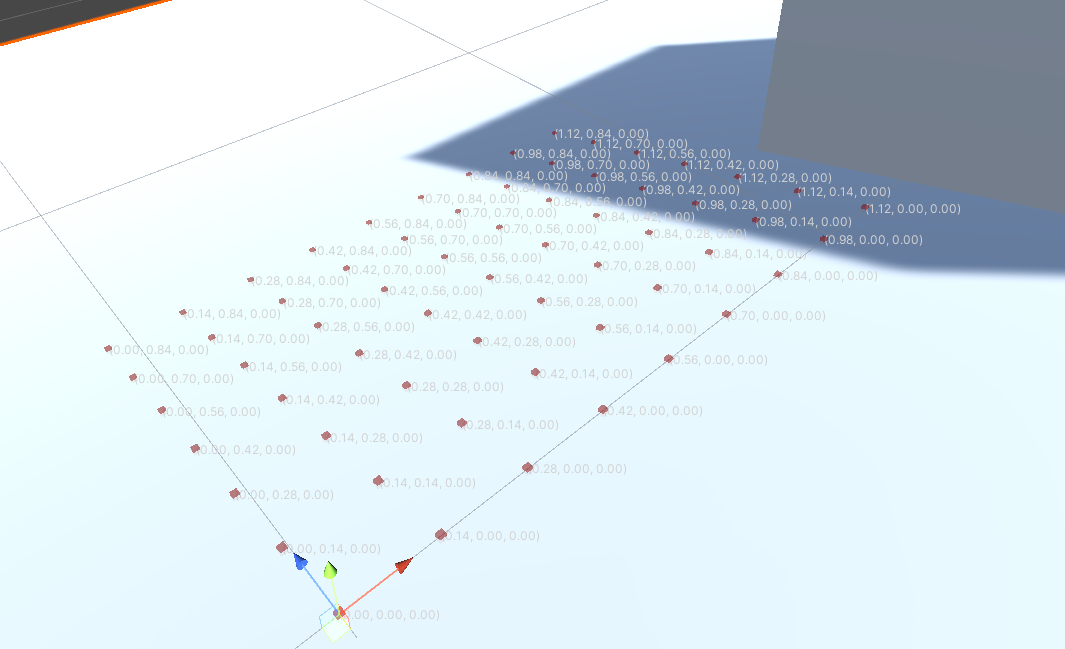
 这就导致用户难以一站式完成CalibrateTool的使用,需要自己手动再去调整人物模型或者场景素材,而往往这种调整还牵扯到matchings(MultiviewX接受的一种输入)的坐标变换,每个人实现matchings的方法都不一样,这里提个醒,坐标变换的顺序必须是: 缩放->旋转->平移。
这就导致用户难以一站式完成CalibrateTool的使用,需要自己手动再去调整人物模型或者场景素材,而往往这种调整还牵扯到matchings(MultiviewX接受的一种输入)的坐标变换,每个人实现matchings的方法都不一样,这里提个醒,坐标变换的顺序必须是: 缩放->旋转->平移。