WildPerception 是一个利用 Unity Perception Package 来生成大规模多视角视频数据集的工具。
其允许用户导入自己的 Humanoid 人物模型,或者利用 SyntheticHumans Package 以合成人物模型,从而在自定义的场景中模拟行人。配合 MultiviewX_Perception 可以得到符合 Wildtrack 格式的数据集。
注意:
- 原 MultiviewX_FYP 现更名为 MultiviewX_Perception
- 原 CalibrateTool 已集成到了此处,将不再独立导出
- 开发使用的 Editor 版本为 2022.3.3f1,不保证之前版本(尤其是2022.2之前)的表现。 Unity Perception Package 要求一定版本的 HDRP 。
Support For SyntheticHumans
添加 WildPerception、 SyntheticHumans Package 到您的项目中,推荐导入 SyntheticHumans 官方提供的 Samples,具体过程请参考:Install Packages and Set Things Up
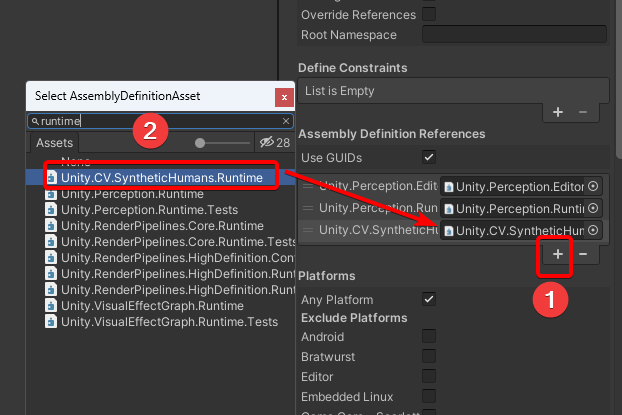
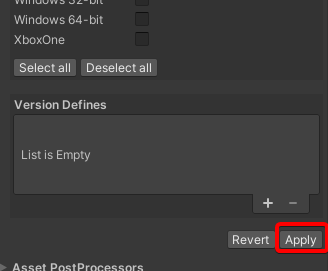
为 TsingLoo.WildPerception.asmdef 添加 AssemblyDefinitionReferences,选择 SyntheticHumans 提供的 Unity.CV.SyntheticHumans.Runtime,而后在页面底部右下角点击 Apply,保存。
找到
RuntimeModelProvider.cs脚本,更改 false 为 true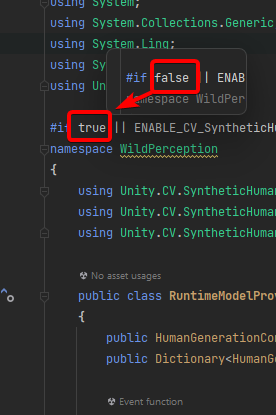
将 RuntimeModelProvider 组件分配给场景
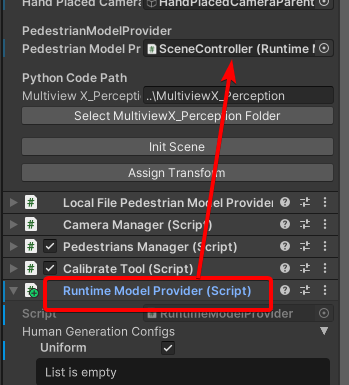
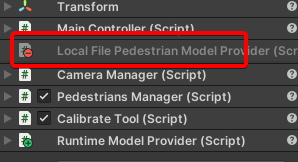
移除其他的ModelProvider
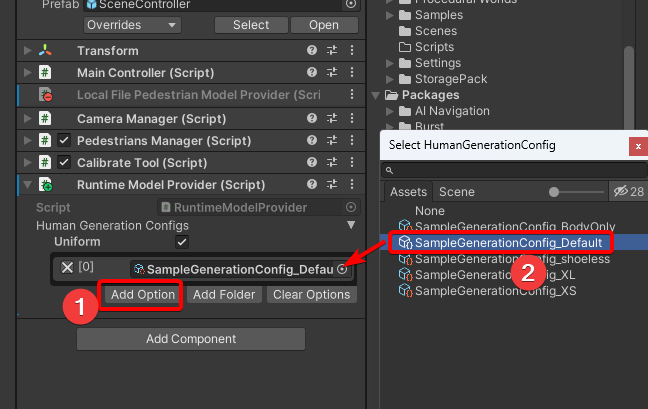
添加 HumanGenerationConfig,Config 的具体配置请参考此文档下半部分:Generate Your First Humans
- 运行
Import
有两种方法可以将 WildPerception 包添加到您的项目中。
注意:
- 由于需要安装相关依赖,应该在联网环境中导入此包
[Method 1] Add package from git URL
注意:
- 这需要您的设备有 git 环境,可以去这里安装:git 。
- 由于目前 Package Manager 的限制,若如此做不可打开示例场景 SampleScene_WildPerception,但不影响其他功能。
Unity Editor 中打开 Window -> Package Manager
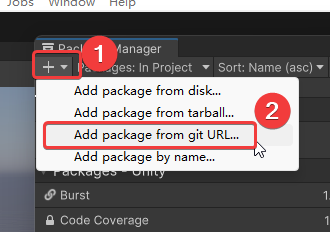
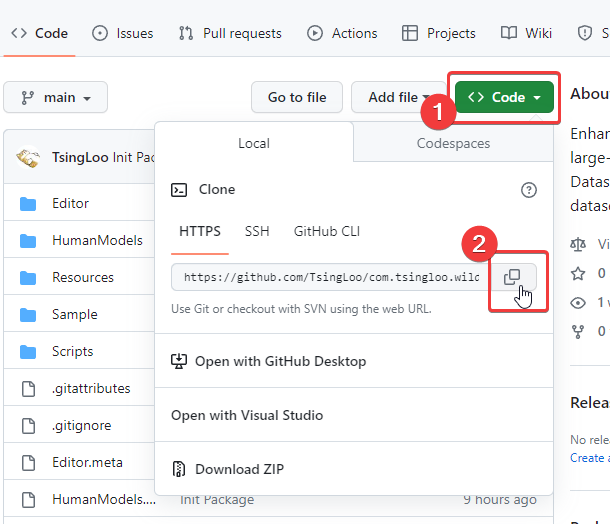
复制本项目地址,填写并添加
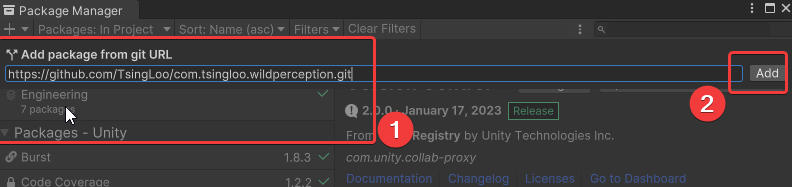
大约三到五分钟后,添加完成,Unity 开始导入新包。
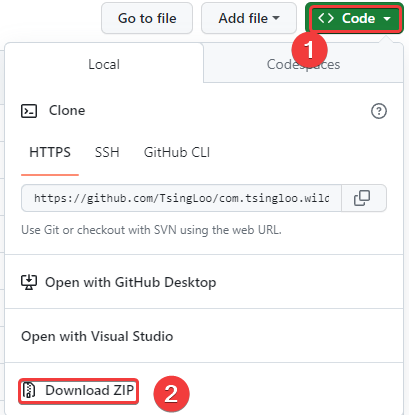
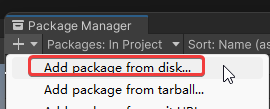
[Method 2] Add package from disk
通过 git clone 或者直接从 github 上下载ZIP文件,或者从此处[Download WildPerception] 下载包。
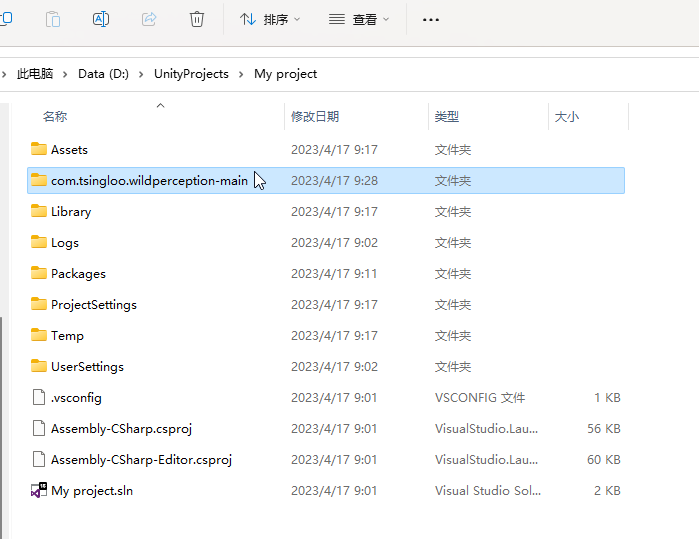
将此ZIP文件解压,放到非项目Assets文件夹中(在项目文件夹外亦可)
Unity Editor 中打开 Window -> Package Manager
将package.json选中并确定。
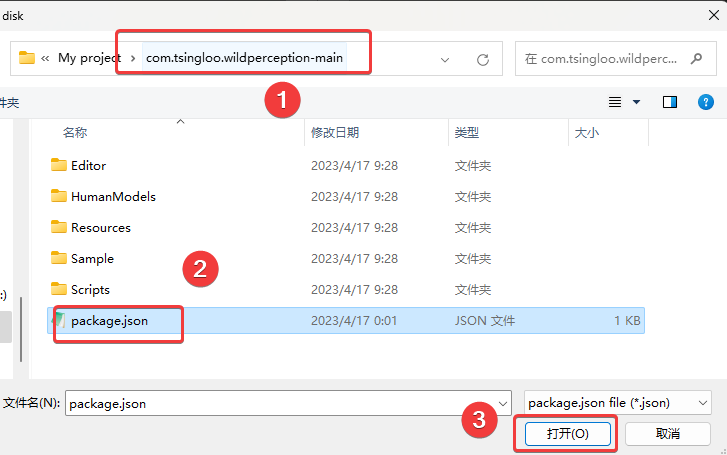
大约两分钟后,添加完成,Unity 开始导入新包。
Setup
您可以很快赋予您的场景生成序列帧的能力,只需要简单的几步配置。
若您使用的是方法2来添加此包,不妨打开场景 Packages -> WildPerception -> Sample -> SampleScene_WildPerception。 这个场景中比较简洁,如下图所示,有预制体SceneController 和一些GameObject
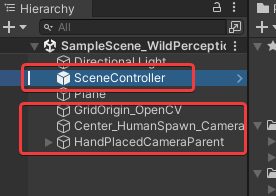
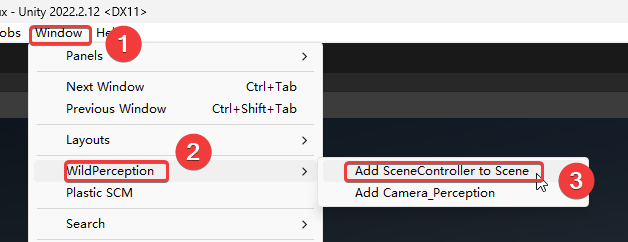
若您想使用自己搭建的场景,请为这个场景添加预制体 SceneController
SceneController
SceneController 集成了所有的配置与功能。
场景导入 SceneController 后,可以打开其Inspector面板,请按照您的情况配置。
Main Controller
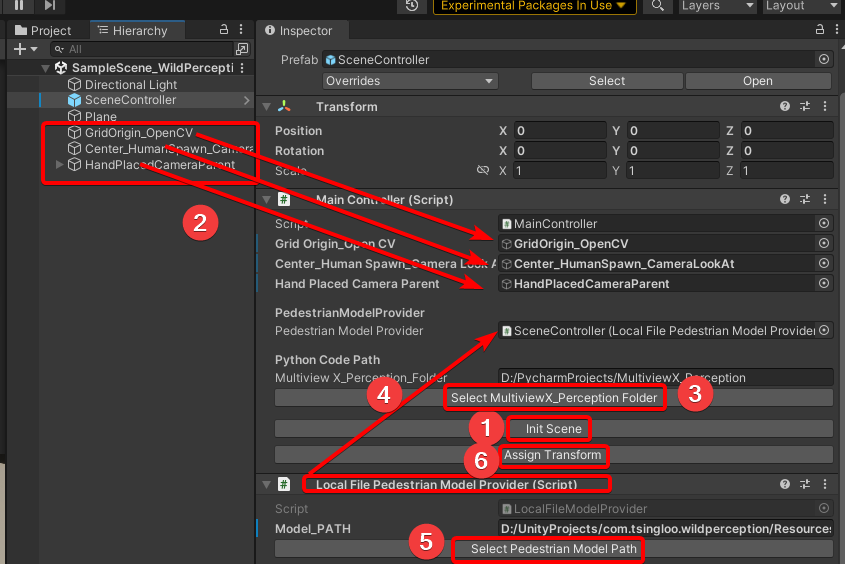
点击 Init Scene,场景中会自动生成所需的GameObject,请在场景中将这些 GameObject 置于所需的位置,随后点击 Assign Transfrom
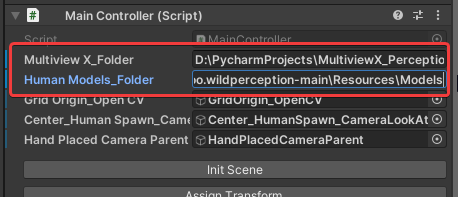
请设置 MultiviewX_Perception 项目的绝对路径,
若使用 LocalFilePedestrianModelProvider, 请设置 Mode_PATH 的绝对路径,此路径务必在一个路径包含”Resources/Models”的文件夹下,且此文件夹中有且仅有人物模型的预制体(.prefab),而非.fbx等模型文件。若您的项目中还没有人物模型,可以使用示例模型,其在 com.tsingloo.wildperception-main\Resources\Models 下,请使用其绝对路径。
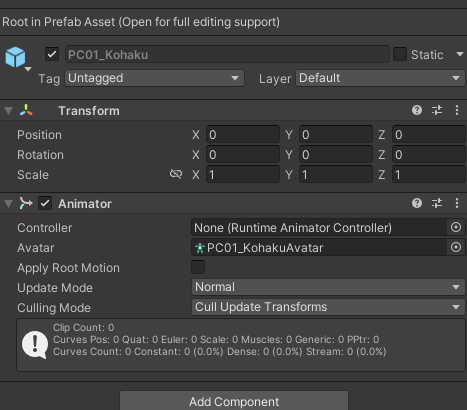
对于人物模型,仅仅要求其具有 Humanoid 骨骼,并带有 Animator组件,其 Runtime Animator Controller 可以为空,若为空,将会在其生成时使用您在 People Manager 中配置的默认Runtime Animator Controller。
注意:
- 请尽量保证GridOrigin_OpenCV的纵坐标(Y)与Center_HumanSpawn_CameraLookAt的纵坐标(Y)相同,否则可能会出现标定不准确的情况,这个问题可能会在后续工作中修复。
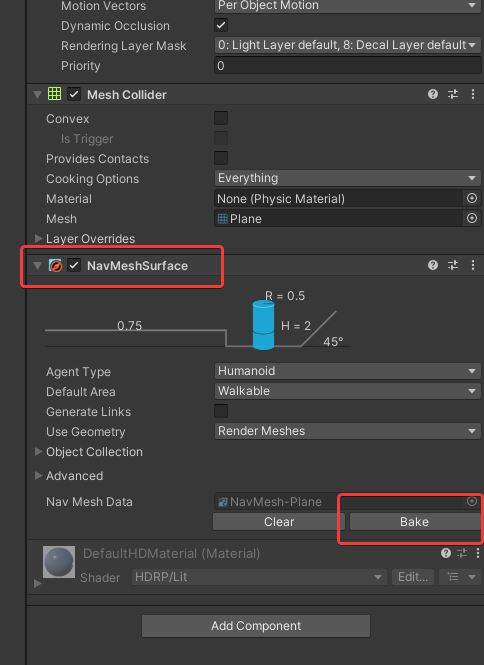
- 请确保场景中供人物模型行走的平面携带有 NavMeshSurface 组件,并已完成烘焙,若您未在 Add Component 中找到这个组件,请前往安装 Package Manager -> Packages: Unity Registry -> AI Navigation,此处使用的版本是 1.1.1
Camera Manager
Camera Manager 管理并控制着相机相关的内容,您可以在这里配置将在场景运行多少帧后开始导出序列帧(Begin Frame Count)、相机的位置类型(自动生成 Ellipse_Auto 或者手动摆放 By Hand)、相机的自动生成参数 Ellipse_Auto Settings
Camera Place Type
若您希望程序自动生成相机,请使用Auto
若您希望手动放置相机,请使用 By Hand
并从菜单中添加相机,为这个场景添加相机预制体 Camera_Perception,并将预制体放在HandPlacedCameraParent下
Ellipse_Auto Settings
此处您可以配置相机的自动生成参数。
| 参数名 | 备注 |
|---|---|
| Level | 有几层相机 |
| Nums Per Level | 每层多少个相机 |
| Height First Level | 第一层离地(LookAt) 多少垂直高度(已经换算为了OpenCV下长度) |
| H Per Level | 若有多层,每层层高(已经换算为了OpenCV下长度) |
| Major Axis | 椭圆主轴长度 (已经换算为了OpenCV下长度) |
| Minor Axis | 椭圆副轴长度 (已经换算为了OpenCV下长度) |
| Camera Prefab | 将会被自动生成的相机的预制体 |
Pedestrians Manager
此处您可以配置人物生成的相关参数。
| 参数名 | 备注 |
|---|---|
| Default Animator | 人物模型使用的默认动画控制器 |
| Add_human_count | 每次敲击空格将会新生成几个人物模型 |
| Preset_humans | 场景初始化后生成多少个模型 |
| Largest,Smallest,X,Y | 规定初始化生成模型的区域(绿色矩形辅助线)以及行人的活动范围 |
| Outter Bound Radius | 人物模型回收边界,请设置大一些,务必使此边界不与 Grid 相交,否则可能出现Editor 卡死,这个问题会在后续工作中修复 |
AbstractPedestrianModelProvider
实现此类以能为 Pedestrians Manager 提供行人模型(将其拖拽到 Main Controller 的 Pedestrian Model Provider 属性槽中,默认为 LocalFilePedestrianModelProvider)
CalibrateTool
用于相机的标定,为 MultiviewX_Perception 提供数据,请见:CalibrateTool